Yuanzhe CUI

| Address | A435. Kaiwu Bldg. of Mechanical Engineering, Tongji Univ., No. 4800 Cao An Rd., Shanghai 201804, P. R. China |
Yuanzhe Cui 2020 Ph.D. Student
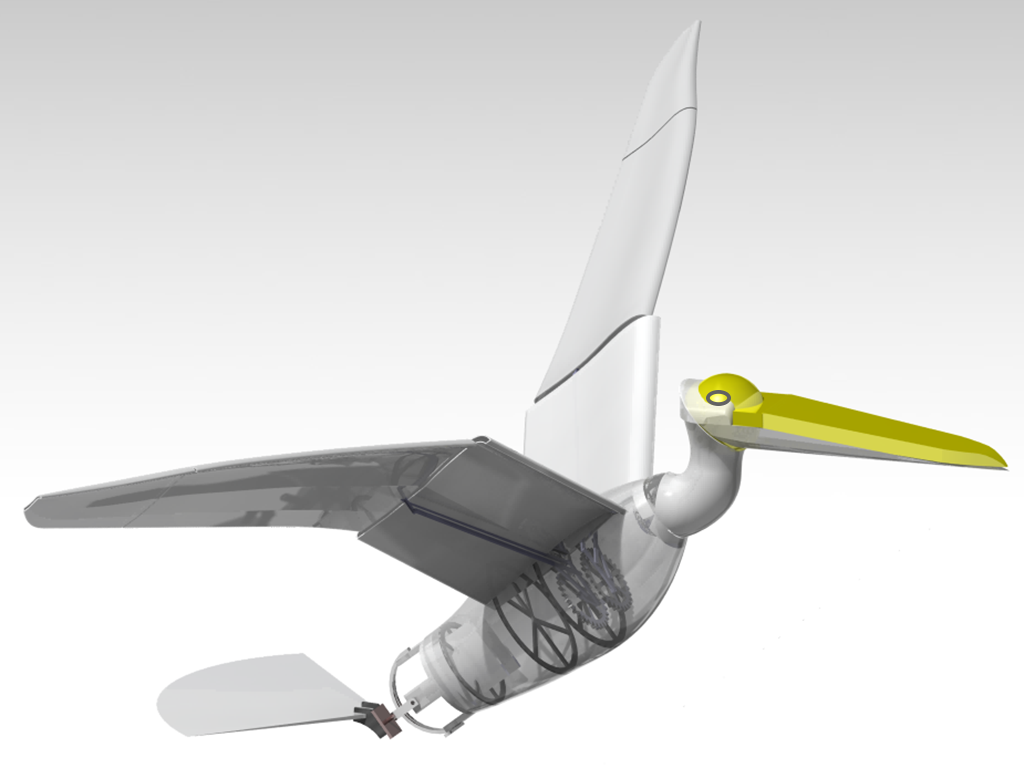
| Bionic Flight Control | ||
|---|---|---|
| Electromechanical control design of flapping -wing robot | Integrated Control of UAVs | |
| Integrated operation method of UAVs based on reinforcement learning | ||
| Hardware debugging of UAV flight control | ||
| Research on cooperative operation and force conflict resolution of multiple aerial robotic manipulators | ||
| Control problem of a drone and a manipulator with a strong coupling model | ||
| Cooperative Force Conflict Resolution and motion planning for multiple aerial robotic manipulators | ||
 |
 |

| [6] | 2024.1.9 | Design, Force control and Load Stabilization of Aerial Manipulator. Tongji University, Shanghai, China. |
| [5] | 2022.12.3 | Energy-saving Flight Method of Bionic Flapping-wing Robots Based on Monte Carlo Sampling. Tongji University, Shanghai, China. |
| [4] | 2022.7.9 | An Optimized Control Framework for the Flight Energy-saving of a Flock of Flapping Wing Robots. Humburg, Germany (Online). |
| [3] | 2021.12.12 | Section for Bionic swarm flapping-wing robots. Tongji University, Shanghai, China. |
| [2] | 2020.12.12 | Bionic Flight Control Method for Heterogeneous UAVs. Tongji University, Shanghai, China. |
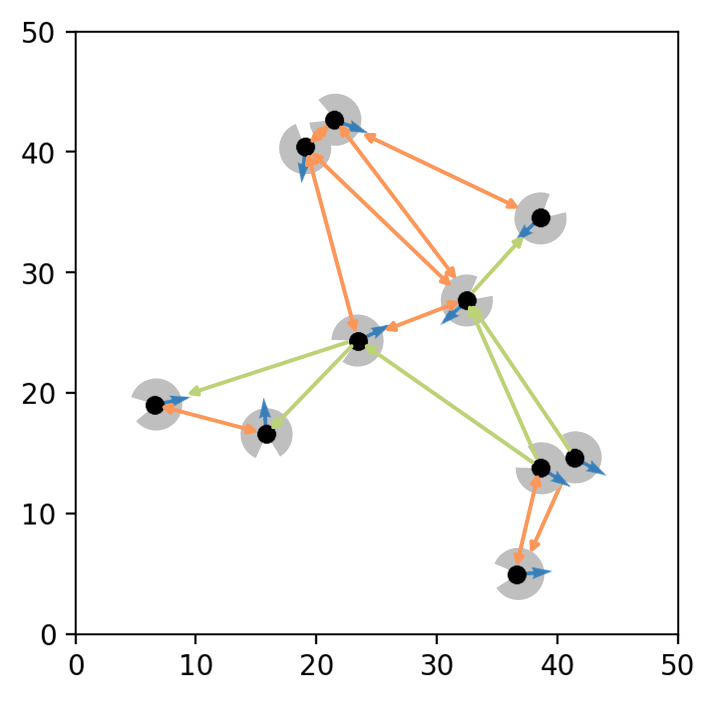
| [1] | 2021.10.16 | Collective Dynamics and Visual Interaction Topology of Bionic Flapping-wing Robot Flock. Beijing, China. |
| [5] | Yuanzhe Cui, Tong Li, Hongwei Chen, Chen Ding, and Qirong Tang*. An Impact-Aware Implicit Planning and Control Framework for Cooperative Aerial Transportation. Control Engineering Practice, 2026. | |
| [4] | Yuanzhe Cui, Tong Li, Shibo Su, and Qirong Tang*. Distributed Geometric Control of Underactuated UAVs for Cooperative Transportation. In: Proceedings of the International Conference on Swarm Intelligence (ICSI), Jul. 11-15, 2025, Yokohama, Japan, pp 261-270. | |
| [3] | Yuanzhe Cui, Zhipeng Xu, Lou Zhong, Pengjie Xu, Yichao Shen, and Qirong Tang*. A task-adaptive deep reinforcement learning framework for dual-arm robot manipulation. IEEE Transactions on Automation Science and Engineering, 22: 466-479, 2024. | |
| [2] | Yuanzhe Cui, Wei Zhu, Yichao Shen, Peter Eberhard, and Qirong Tang*. An Optimized Control Framework for the Flighting Energy-saving of a Flock of FlappingWing Robots. IUTAM Symposium on Optimal Design and Control of Multibody Systems, July 18-21, 2022, Hamburg, Germany. | |
| [1] | Qirong Tang*, Yuanzhe Cui, Jingtao Zhang, Pengjie Xu and Kun Zhang. Collective Dynamics and Visual Interaction Topology of Bionic Flapping-wing Robot Flock. In: Proceedings of the IEEE International Conference on Unmanned Systems (ICUS), Oct. 15-17, 2021, Beijing, China, pp 902-907. | |
1. Laboratory daily work.
2. Management of Laboratory Websites.
3. Laboratory equipment management and registration.