
1. Swarm Intelligence and Swarm Robotics
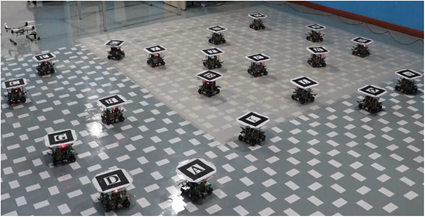
In nature, organisms such as bird flocks, ant colonies, bee colonies, etc. accomplish tasks that are difficult for individuals to achieve alone by collaborating with each other, e.g., bird flocks migrate over long distances, ants carry food, and bee colonies build nests. Inspired by this, we has conducted in-depth research on swarm robotics. The collaborative ability of robotic groups can overcome the limitations of single robots and accomplish more complex tasks, which are widely used in the fields of search and rescue after disasters, agriculture, nuclear leakage handling, environmental detection and complex workpiece assembly.
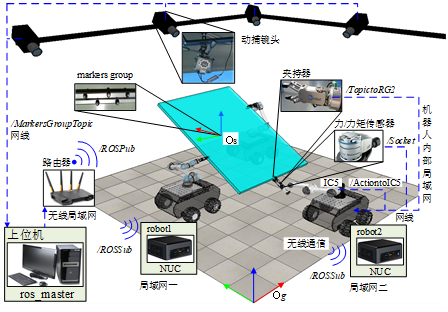
We focuses on the structural design, coordinated control and autonomous decision-making of swarm robots, and conducts in-depth research on airborne, ground, and underwater swarm robots. Inspired by the ant colony pheromone, our team has designed several ground-based swarm robots, proposed vector pheromone, realized cooperative environment exploration and target tracking for ground-based swarm robots, and on the basis of this, realized cooperative search for air-ground heterogeneous swarm robots. Inspired by the flocking flight of birds, our team studied the structural design, motion control and formation of bionic flapping wing aircraft, as well as the energy-saving mechanism of multiple bionic flapping wing robots flying cooperatively, which improves the sustained operation time of the flapping wing aircraft cluster. In order to realize the handling of large materials, our team researched the cooperative handling method of multi-mobile robotic arms, proposed the interactive force coordination and positional coordination control scheme for cooperative handling system, and realized the cooperative and supple obstacle-avoidance handling operation of large-size plates. In order to improve the load capacity of airborne swarm robots, our team researched the multi-UAV cluster system, designed the structure of the cluster system, and proposed the cooperative sensing and autonomous decision-making method of the cluster system, which greatly improved the load capacity of the UAV cluster. In addition, our team researched the cooperative operation of large-scale underwater swarm robots, including the cooperative round-up of underwater swarm robots and the cooperative operation of arm-carrying submersibles, so as to realize the efficient cooperative operation of underwater robot clusters.

 |
 |
2. Space Robot Technology and Its Applications
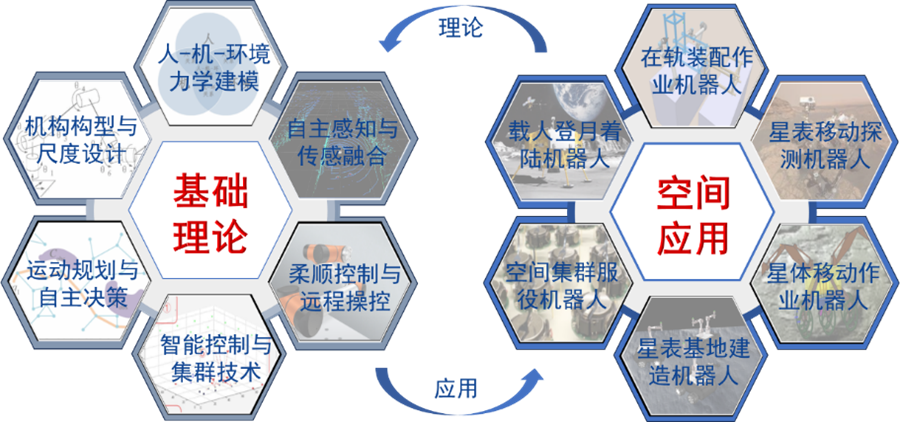
Space robots are crucial for realizing automation and intelligence in space operations. They play a key role in both unmanned and manned space missions, including space scientific exploration and base construction activities. The space environment differs significantly from the ground environment, with space robots operating in conditions such as microgravity, high vacuum, ultra-low temperatures, intense radiation, and poor lighting. These extreme conditions present substantial technical challenges for space robots. To address these challenges, research is conducted in laboratories focusing on various aspects of space robot technology, including: mechanisms, joint drive systems, end effectors for grasping and operation, walking and moving mechanisms, motion dynamics, motion/trajectory planning, force-position compliance control and intelligent control, etc. These technologies of space robot are applied in various domains, such as in-orbit operations, planetary exploration robot, base construction robot, and high-performance mobile robots. The corresponding design method, theoretical system and their applications of space robot are established.


 |
 |
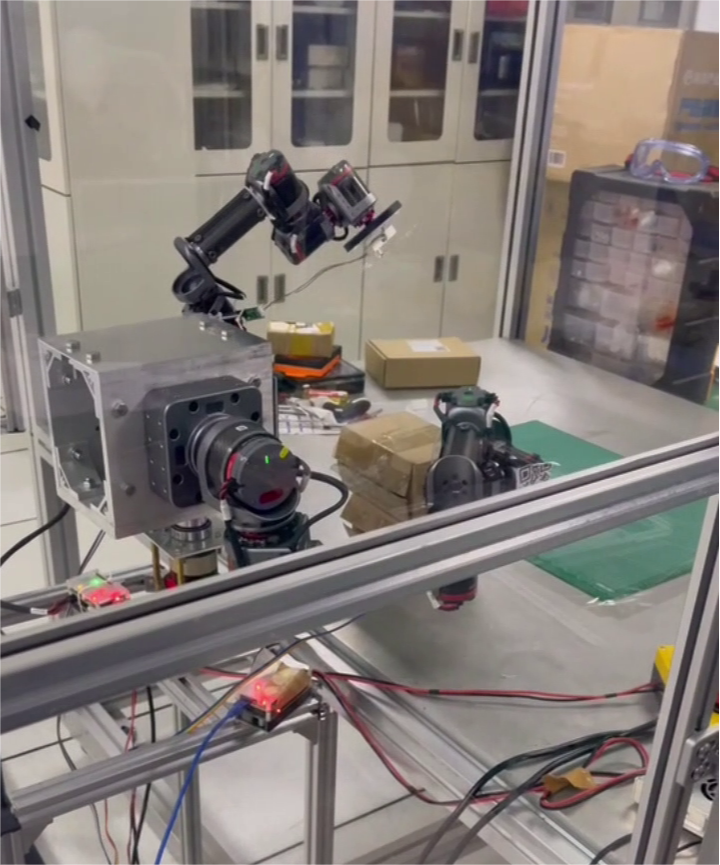
3. Intelligent Robotic Hands/Arms and Dexterous Manipulation Technology
Robotic arms and hands are widely used in industrial, medical, service, and other fields. Combined with a new generation of artificial intelligence technology, this team mainly studies kinematics and dynamic modeling methods, precise and intelligent control algorithms, multi-sensor fusion approaches for environmental perception, autonomous navigation and trajectory planning methods, human-machine collaboration hybrid enhanced intelligent algorithms, and so forth. Based on the precise control of robotic arms and hands, combined with perception and understanding of the environment, intelligent machines would achieve autonomous learning and adaptation and form a hybrid-enhanced intelligence through the interaction of human beings and cognitive models.
 |
 |
 |
 |
 |
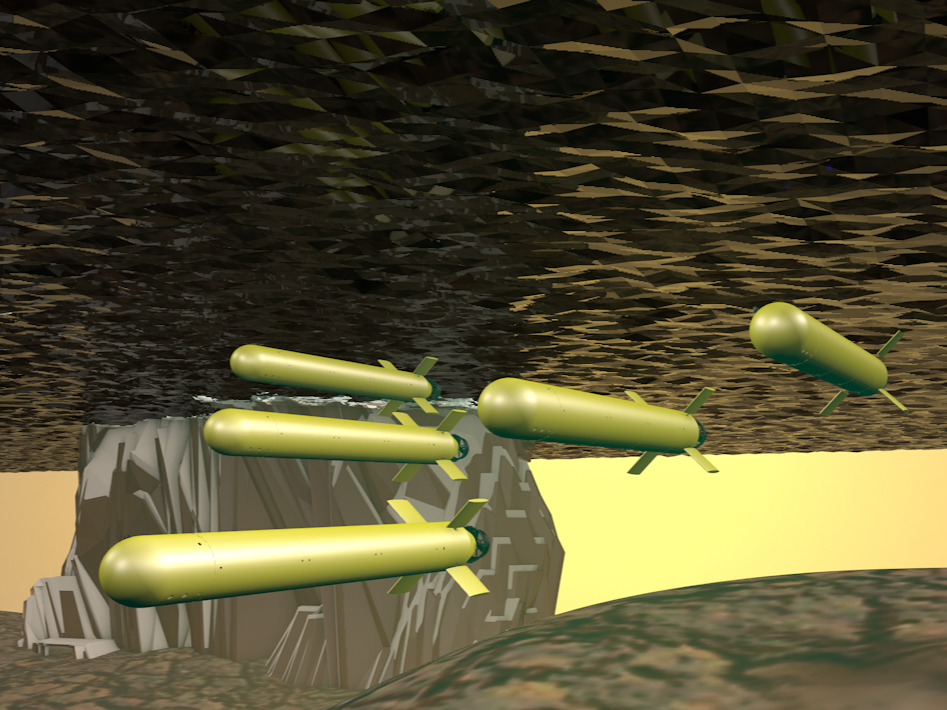
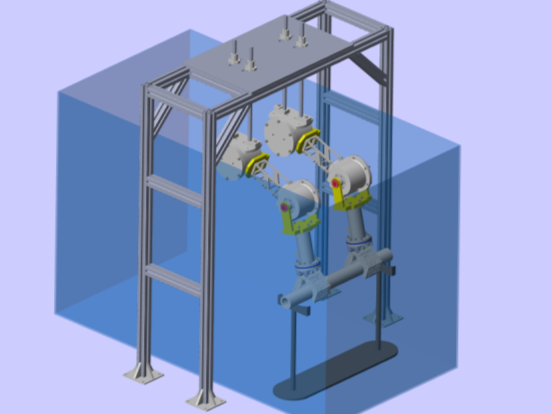
4. Cooperative Manipulation Technology for Underwater Robots
Underwater robots play an important role in marine exploration, development and utilization of marine resources, and other engineering projects. With the increasing demand and complexity of underwater manipulation, the technology of underwater robots with operational capabilities has become one of the research hotspots. However, the special underwater environment makes perception and communication among multiple robots susceptible to limitations such as narrow bandwidth, low speed, underwater multipath effects, and communication delays. It is challenging to achieve group coordinated behavior in confined underwater environments by utilizing only local interaction information. In addition, underwater robots with operational capabilities are susceptible to vehicle-manipulator coupling, water flow interference, and other factors, overcoming difficulties such as model uncertainty and external environmental interference is of great significance for underwater tasks. In response to this, our laboratory has independently developed underwater robots such as underwater vehicle-manipulator system, underwater dual arms, and autonomous underwater vehicles. Key technologies such as rapid recognition and tracking of underwater multiple targets, cooperative localization under ocean current interference, vehicle-manipulator decoupling control, and cooperative decision-making of swarm underwater robots have been studied, achieving robust, high-precision, and high-efficiency cooperative manipulation of underwater robots. Up to now, a series of underwater manipulation tasks have been successfully completed, including underwater peg-in-hole, underwater dual arm cooperative transportation, channel dredging, and cooperative capture of dynamic targets. In future, in-depth studies will be conducted on the design of new underwater mechanisms, cross domain perception and communication, optimization of global underwater behavior, and agile underwater manipulation.
 |
 |
 |
 |