Lu DING
| Address | Kaiwu Bldg. of Mechanical Engineering, Tongji Univ., No. 4800 Cao An Rd., Shanghai 201804, P. R. China |
| Swarm Robotics | ||
|---|---|---|
| Coordination Behavior of Swarm Robots Based on Stigmergy; | ||
| Swarm Robots Search for Multiple Targets Simultaneously; | ||
| Development of Swarm Mobile Robots | ||
About Swarm Robots
Swarm robots is a system consisting of large numbers of simple robots. Under the control of swarm intelligence principles, it is supposed that a desired collective behavior emerges from the interactions between the robots and interactions of robots with the environment. Mostly, these principles are inspired by insects or birds, which have swarm behaviors. Swarm robots also have the function of perception, memory and information processing. With these characteristics above, swarm robots can be able to complete some complex tasks.
Research on Coordination Behavior of Swarm Robots Based on Stigmergy
Stigmergy is kind of biological information coordination mechanism. Individuals in the swarm affect the behaviors of other individuals indirectly through leaving pheromones in the environment without central control and direct information communication. Finally, systematic activity characteristics are supposed to emerge in the swarm. Using stigmergy in the control of coordination behaviors, e.g., aggregation, foraging, of swarm robots helps to avoid the disadvantages of central control and "information explosion" of direct communication when population size is large.
Swarm Robots Search for Multiple Targets Simultaneously Guided by Particle Swarm Optimization
Particle Swarm Optimization regards the space where particles move as the solution space of the problem to be solved. Particles communicate with each other and continuously approach the best solution. When utilizing swarm robots to search for multiple targets simultaneously, we can regard every robot as a particle, group these robots dynamically and use Particle Swarm Optimization to guide every group to search for the target nearby. Finally, the swarm of robots are able to find multiple targets in the environment.
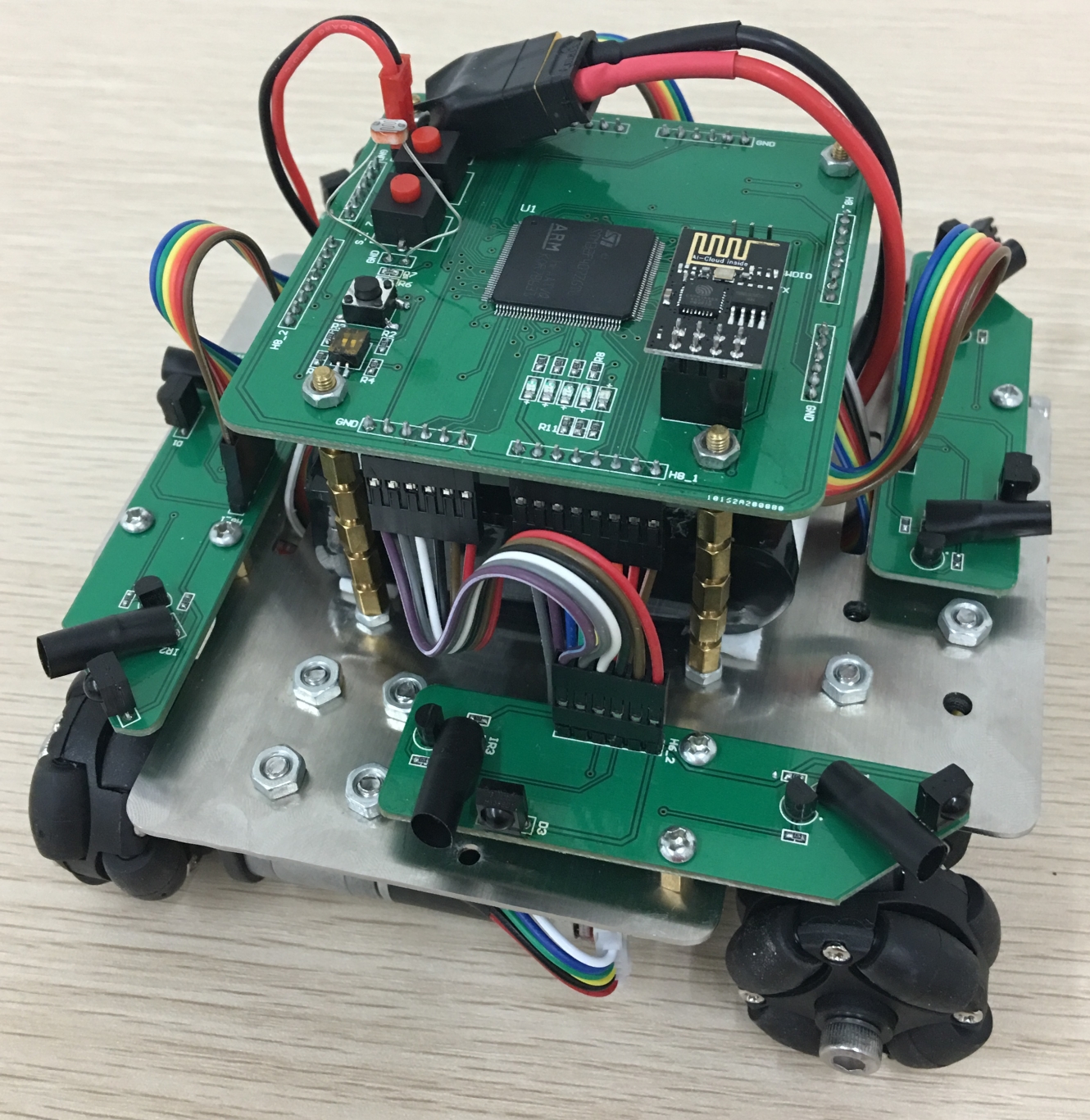
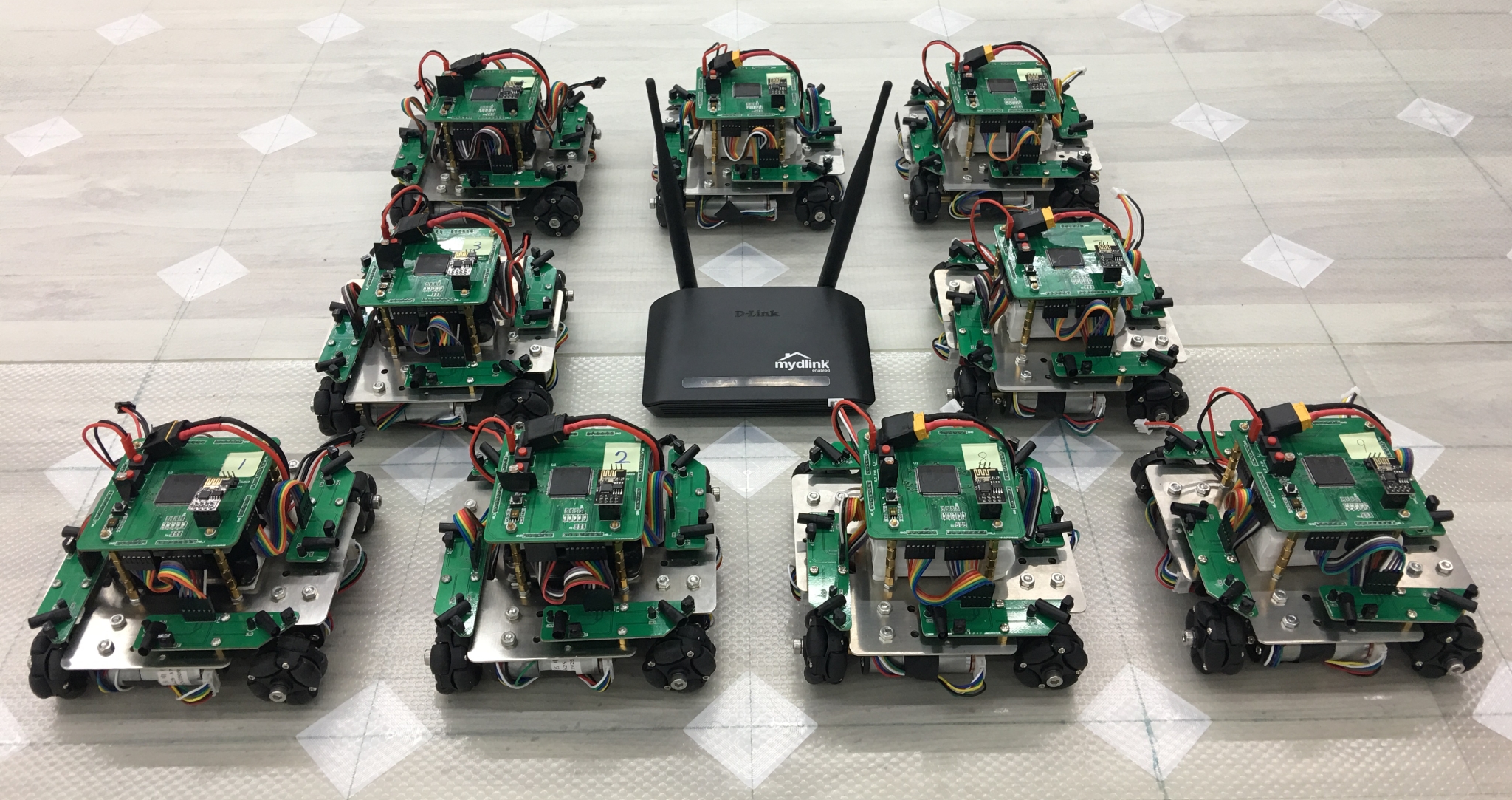
Development of Swarm Mobile Robots
A kind of small omni-directional mobile robot and a experimental platform of swarm robots are developed by our lab. The small mobile robot has functions of omnidirectional moving, light strenght sensing, obstacle avoidance using infrared sensors, reading and writing RFID tag, wireless communicating using Wi-Fi module and so on. The experimental platform consisting of many this kind of robots is utilized to study, realize and validate various swarm intelligence algorithms.
 |
 |
| [4] | 2017.12.24 | Study on Stigmergy-based Coordination Method of Swarm Robots and Experimental Verification. Tongji University. Shanghai, China. |
| [3] | 2016.10.19 | Development of Swarm Mobile Robots and Research on Stigmergy-based Coordination Method of Swarm Robots. Presentation as part of the denfense of graduate student thesis proposal. Tongji University. Shanghai, China. |
| [2] | 2015.12.19 | Development of Swarm Robots Experiment Platform. Tongji University. Shanghai, China. |
| [1] | 2015.06.17 | Research on Swarm Robots Searching for Multiple Targets Simultaneously. Presentation as part of the Bachelor Defense. Tongji University. Shanghai, China. |
| [5] | Qirong Tang*, Lu Ding, Jiaying Li, Yuan Zhang, and Fangchao Yu*. A Stigmergy Based Aggregation Method for Swarm Robotic System. IEEE SSCI 2017. |
| [4] | Qirong Tang*, Fangchao Yu, Yuan Zhang, Lu Ding, and Peter Eberhard. A Stigmergy Based Search Method for Swarm Robots. ICSI'2017. |
| [3] | Qirong Tang*, Lu Ding, Fangchao Yu, Yuan Zhang, Yinghao Li, and Haibo Tu. Swarm Robots Search for Multiple Targets Based on an Improved Grouping Strategy. IEEE/ACM Transactions on Computational Biology and Bioinformatics. 7pages. |
| [2] | Qirong Tang, Lei Zhang, Wei Luo, Lu Ding, Fangchao Yu, and Jian Zhang*. A Comparative Study of Biology-inspired Algorithms Applied to Swarm Robots Target Searching. ICSI'2016. |
| [1] | Qirong Tang*, Fangchao Yu, and Lu Ding. A Grouping Method for Multiple Targets Search Using Swarm Robots. ICSI'2016. |
Responsible for material management and activity organization of RMB.