Lingkai ZHANG
| Address | A435. Kaiwu Bldg. of Mechanical Engineering, Tongji Univ., No. 4800 Cao An Rd., Shanghai 201804, P. R. China |
| Rigid-flexible multibody dynamics | ||
|---|---|---|
| Research on structure design and compliant capture of new end-effector; | Integrated modeling of space brachial arm system; | |
| Research on active compliance control; | Design and construction of an experimental prototype of end-effector | |
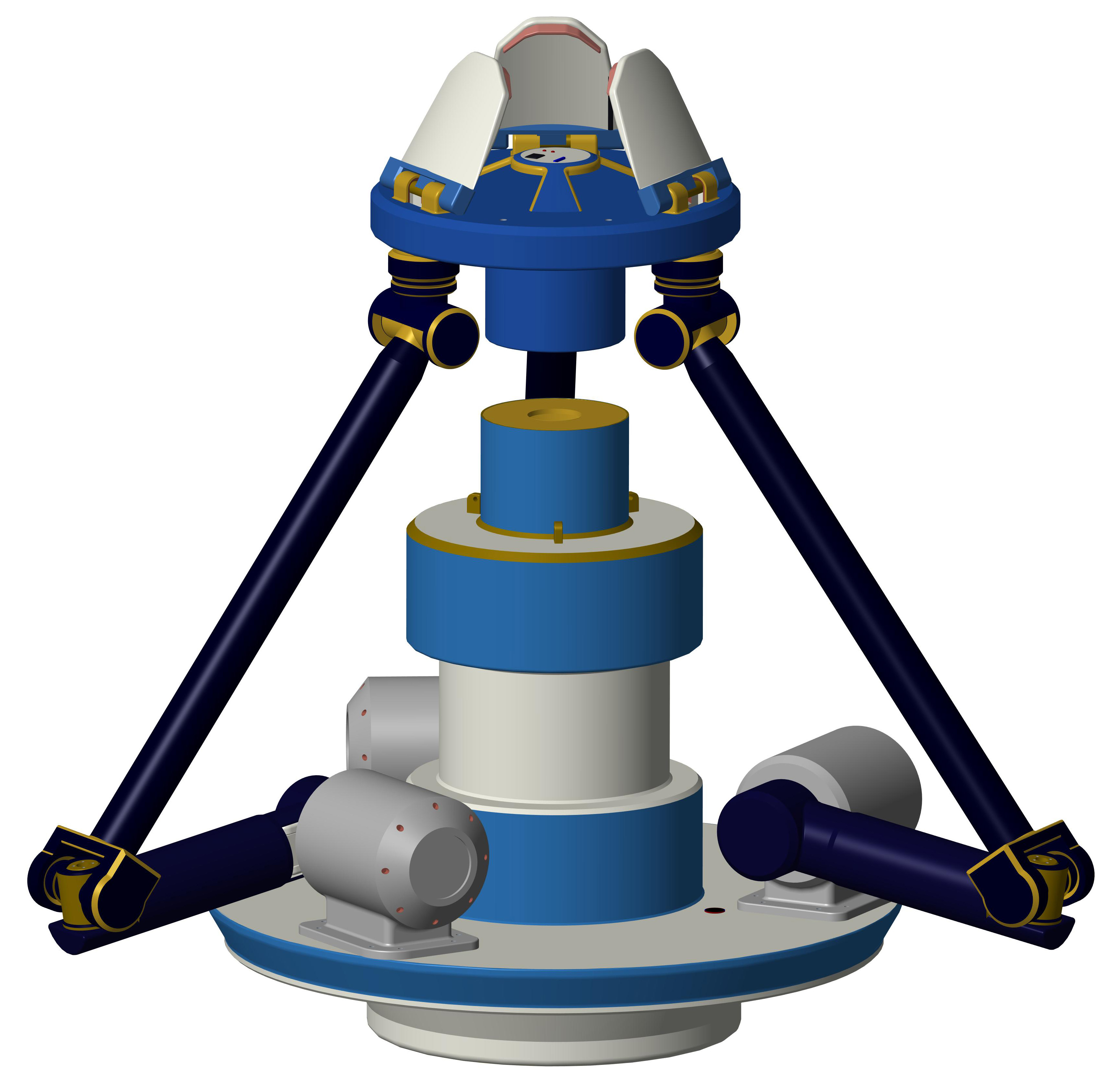
Research on the design modeling and compliance control of the end actuator of the space manipulator:
For the space manipulator on orbit capture mission requirements for cooperative targets and non cooperative targets (cooperative target: electrical connections can be established; and the mechanical arm system and communication after the arrest of non cooperative target: not with the mechanical arm system, after the arrest to make electrical connections), the design of a series parallel hybrid end effector. The design structure is shown as below. The main body is a parallel structure of DELTA configuration, and the 13 petal capture structure is connected in series at the top. Because of its high structural stiffness, the parallel structure has a good positioning accuracy for its apex. The three lobe catch mechanism draws on the guidance valve mechanism of the current spacecraft rendezvous and docking, and it can catch the tail pipe of the failed satellite. After dynamic modeling on the basis of structure, the active compliance control simulation experiment was carried out. Based on the combined simulation of ADAMS and MATLAB as the software experiment platform, the better results of the capture test are obtained.
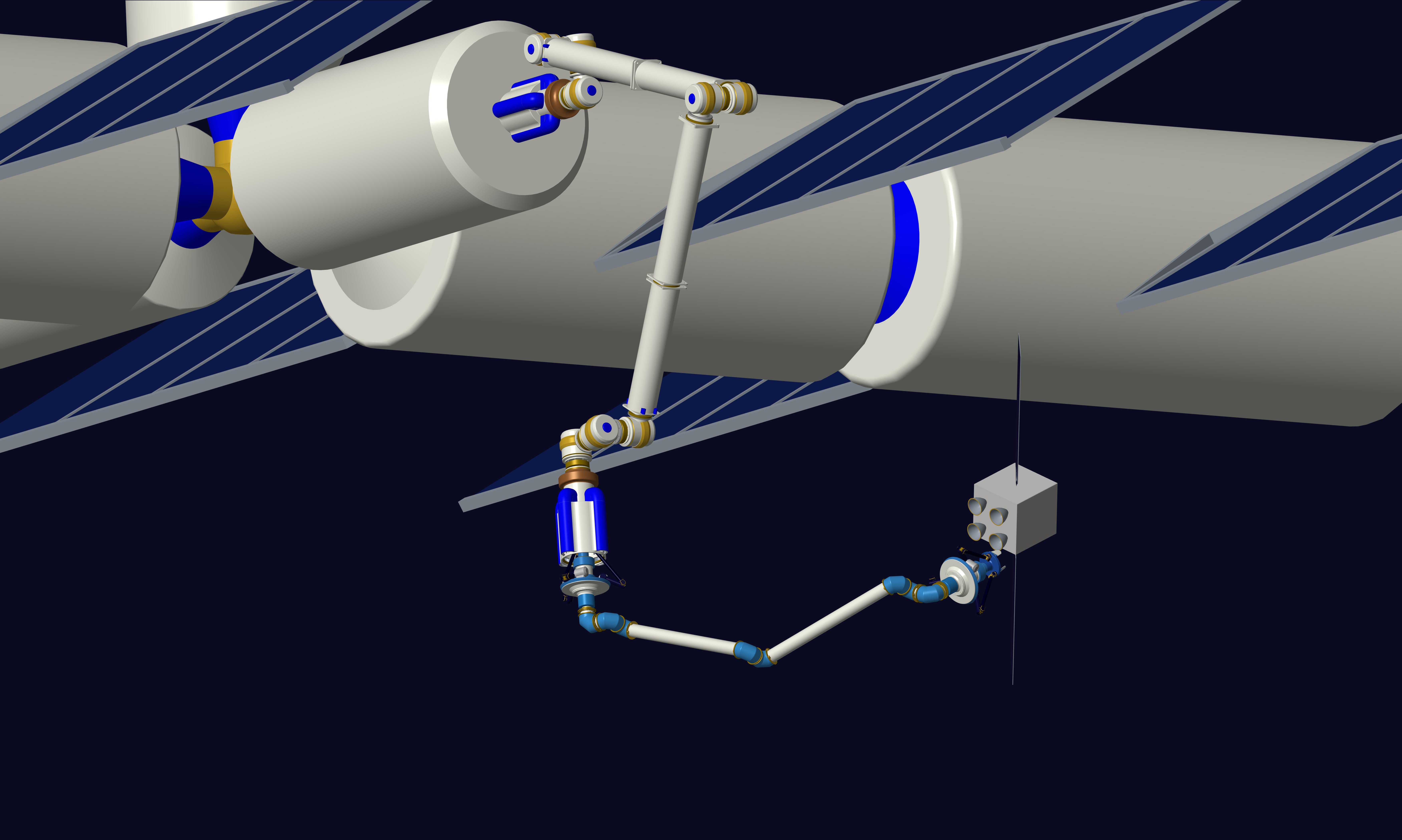
Research on the control and control of space substandard arm system in orbit:
The design of space manipulator system were combined, strength check and test, setting conditions, establish kinematics and dynamics of composite arm system model and dynamic model of flexible arm considering joint working arm under the lash, lay the foundation for the simulation experiment. On the basis of dynamic modeling, the active compliance control simulation experiment is carried out. Based on the joint simulation of ADAMS and MATLAB as the software experiment platform, the ideal trajectory tracking curve and force control results are obtained.
| [1] | 2015.12.19 | 考虑机械臂柔性构件的动力学分析. Status Seminar#1. 同济大学. 中国上海. |
| [2] | 2016.10.19 | 空间刚柔耦合子母臂系统末端执行器结构设计与柔顺抓捕策略研究. 研究生课题开题答辩. 同济大学. 中国上海. |
| [3] | 2016.12.31 | 空间子母臂系统结构设计及柔顺抓捕研究进展. Status Seminar#2. 同济大学. 中国上海. |
| [4] | 2017.12.24 | 空间子母臂系统结构设计及柔顺控制仿真研究. Status Seminar#3. 同济大学. 中国上海. |
| [1] | 郑棋棋, 汤奇荣, 张凌楷, 等. 空间机械臂建模及分析方法综述[J]. 载人航天, 2017, 23(1): 82-97. |