Wei LUO
| Address | A435. Kaiwu Bldg. of Mechanical Engineering, Tongji Univ., No. 4800 Cao An Rd., Shanghai 201804, P. R. China |
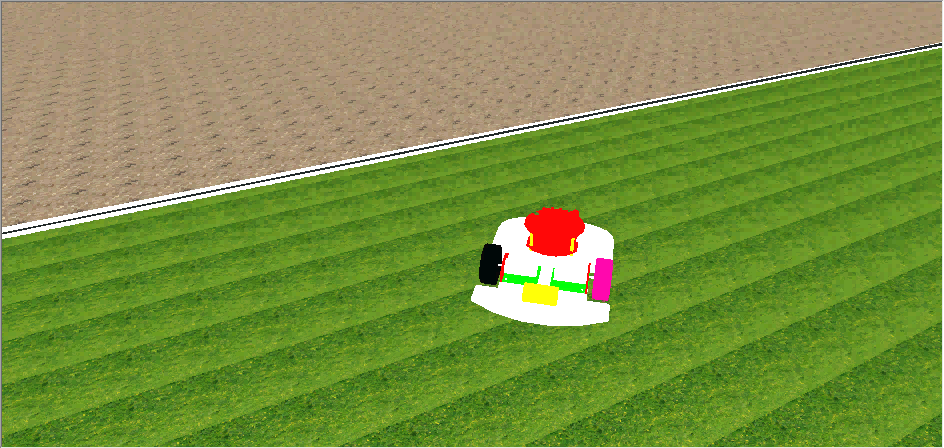
| 3D simulation platform based on physical engine | ||
|---|---|---|
| baed on ODE physical engine | applied to multi robot and target | |
| System reliability analysis | ||
|---|---|---|
| system reliability analysis based on static information | develop of industrial reliability analysis software | |
| Quadrotor system | ||
|---|---|---|
| develop of control unit for quadrotor | autonomous flying control and swarm control | |
| Wireless localization system | ||
|---|---|---|
| research on wireless communication technology | localization based on wireless signal | |
| Machine learning | ||
|---|---|---|
| image reconization based on neural network | transfer learning | |
| [2] | Senlin Wang; Shangqiu Shan; Wei Luo; Xinghong Yu: Robust Adaptive Nonlinear Attitude Control for a Quadrotor UAV. Proceedings of 36th Chinese Control Conference, Dalian, China, July, 26-28, 2017. |
| [1] | Qirong Tang, Lei Zhang, Wei Luo, Lu Ding, Fangchao Yu, and Jian Zhang*. A Comparative Study of Biology-inspired Algorithms Applied to Swarm Robots Target Searching. ICSI'2016. |
| [3] | Dec. 24, 2017: “Image Recognization based on YOLO”, Status Seminar, RMB, Shanghai |
| [2] | May 2, 2016: Master Thesis, "Multi-quadrotor Flying Control Based on Wireless Localization", ITM, Stuttgart |
| [1] | Dec. 19, 2015: "Survey of Wireless Localization System and related Algorithms for Quadrotor", Status Seminar, RMB, Shanghai |
| [1] | Hao Chen, Wei Luo, Pinrong Cai, Yaozhong Wang, Dan Zhang, Jingxin Zhang, Ruiyu Zhong. Autonomous landing assistant system for muti-rotor UAV [utility model patent]. 201720286986.2 |
Websites design and maintance
International receptions
Lecture assistance